4.0 Der Bürstenlosermotor
Der Bürstenlose Motor (bekannter als brushless, aus dem Englischen) löst Bürstenmotoren, vor allem im Flugmodellbau, immer weiter ab. Der Bürstenlosenmotor stellt eine Weiterentwicklung zum Bürstenmotor dar und hat die selben Einsatzgebiete. Sie bieten einige Vorteile gegenüber Bürstenmotoren, wie höherer Wirkungsgrad, längere Haltbarkeit und weniger Wartung. Desweiteren erleichtern sie das Selbstbauen, da sich eine recht große Gemeinde um dieses Thema zusammen gefunden hat. Technisch is es, wegen den Reglern (bei Bürstenlosenmotoren auch Steller genannt), erst seit 10-15 Jahren technisch möglich bürstenlose Motoren im Modellbau zu benutzen. Obwohl der Preis eines Bürstenlosenmotors etwa 5-20x höher ist, als der eines Bürstenmotors, hat der Bürstenlosemotor den Bürstenmotor in fast jeder Beziehung abgelöst, außer in Anfängermodellen, die einer großen Crashgefahr ausgesetzt sind. Der Preis e ines Bürstenlosenmotors liegt zwischen 35 und 400Euro, der Steller eines Bürstenlosenmotors ist auch teurer, er kostet nochmal 50-250Euro. Die Preise hängen extrem von der größe des Modells ab (größerer Motor = höherer Preis). Im Preis eines Bürstenlosenmotors ist der Großteil Entwicklungskosten, die Herstellungskosten dürften von dem eines Bürstenmotors kaum abweichen.
Das Einsatzgebiet der Bürstenlosenmotoren liegt natürlich nicht nur im Bereich des Modellbaus (4.1), er wird auch in anderen alltäglichen Bereichen benutzt, zum Beispiel in DVD-Laufwerken, Staubsaugern oder Lüfter.
4.2 Der Aufbau
Der wichtigste Unterschied zwischen einem Bürstenlosen- und Bürstenmotor ist der, daß bei Bürstenlosen der Stator (das unbewegliche Teil) aus Elektromagneten besteht, und der Rotor aus Dauermagneten. Was dem Bürstenlosen komplett fehlt ist, sind der Polwender und die Schleifkontakte, was der Bürstenlose funktionsbedingt nicht braucht. Auffällig ist auch, daß der Bürstenlose drei Kabel hat. Natürlich hat auch der Bürstenlose eine Glocke (Hülle). Diese Glocke besteht aus möglichst leichtem, stabilen Materlial, wie zum Beispiel aus Kevlar. Damit sich der Rotor drehen kann müßen auch hier Kugellager vorhanden sein, in denen sich die Welle dreht, und in der der Rotor Halt hat .
Nur werde ich erklären, welche wichtigen Teile es an einem Rotor und einem Stator gibt und wie sie heißen.
Der Stator besteht aus Elektromagneten. Jeder Elektromagnet ist ein Zahn oder eine Nut des Stators. Der Elektromagnet besteht aus dem Hammerkopf, dem Hammerstil, dem Rückschluß und der Bewicklung. Der Hammerkopf ist das breitere Teil am Ende jedes Elektromagneten, er führt das Magnetfeld des Elektromagneten. Er führt es gegen das Magnetfeld des Dauermagneten. Um den Hammerstil herum wird der Kupferdraht gewickelt. Der Hammerstil verstärkt und führt auch das Magnetfeld. Der Kupferdraht erzeugt das Magnetfeld. Der Rückschluß ist der Eisenkreis, an dem die ganzen einzelnen Zähne befestigt werden. Dieser Rückschluß muß zwingend aus magnetischem Material sein, da auch er das Magnetfeld lenkt.
Der Rotor besteht aus den Dauermagneten, der Welle, dem Rückschluß und der Verbindung zwischen Welle und Rückschluß. Die Dauermagneten werden (meistens) auf den Rückschluß geklebt. Der Rückschluß übernimmt beim Rotor die gleiche Funktion wie beim Stator, hier sind die Magneten befestigt und er leitet das Magnetfeld. Die Welle liegt im Kugellager des Stators und somit kann sich der Rotor frei drehen. An der Welle wird auch die Luftschraube oder ggf. das Getriebe befestigt, oder was auch immer man drehen will.
Die Zusammenstellung, das Zusammenspiel und die Größe dieser ganzen Einheiten sind wichtig, indem man sie verändert verändert man die Charakteristik des Motors. Die Wichtigsten Einwirkungen durch Veränderung der Einheiten des Motors will ich später erklären, jetzt das Funktionsprinzip.
4.3.0 Funktionsprinzip/Vorteile
Genau wie der Bürstenmotor funktioniert auch der Bürstenlose durch die Lortentzkraft. Die Elektromagneten werden bestromt, nur drehen sich diesmal die, anders als beim Brürstenmotor, Dauermagneten um die Elektromagneten. Auch hier tritt wieder das gleiche Problem auf, der Motor würde sich, wenn sich die Magnetfelder angeglichen haben, aufhören zu drehen. Hier kommt der Steller (Regler) ins Spiel. Der Motor kommutiert (wechselt also die Bestromung) nicht durch mechanische Kontakte, sondern die Phasen werden vom Steller rotierend über die drei Kabel geschalten. Der Motor braucht also eine Hilfe die ihm ein dreiphasen-Wechselfeld erzeugt. Es werden die Elektromagnete also immer nacheinander bestromt und der Rotor folgt dem Wechseln der Bestromung der Elektromagneten des Stators.
Nun sind aber noch nicht alle Probleme beseitigt, denn es bleibt das Problem, woher der Steller weiß in welcher Position sich der Rotor befindet, und somit woher er weiß welche Elektromagneten er bestromen soll.
Hier gibt es im wesentlichen drei verschiedene Arten herauszufinden, wie der Rotor steht.
Die erste Möglichkeit ist es einfach gar nicht zu wißen und die Phasen einfach in einer bestimmten Reihenfolge zu schalten (4.3.1). Das funktioniert aber nur zufriedenstellend wenn die Last an der Welle bekannt ist und das Folgen des Rotors immer gleich ist. Aber selbst hier werden die Phasen nicht immer perfekt geschalten, was aber durch die Trägheit des Rotors übergangen wird. Bei dieser Art die Phasen zu schlaten hat der Motor einen sehr unruigen Lauf und starke Resonanzen.
Die nächste Möglichkeit die Position des Stators herauszufinden ist mit Sensoren (4.3.2). Hierbei werden Sensoren so im Motor angebracht, daß sie dem Regler die Information liefern können, wie der Rotor steht. Hierbei werden entweder hochleistungsfähige Optiksensoren oder sogenannte Hall-Sensoren eingesetzt. Hall-Sensoren können die Position anhand des Magentfelds des Rotors herausfinden und sendet diese Information an den Steller. Wie man sich denken kann ist diese Methode nicht die Beste. Die Sensoren sind oft störanfällig und es bedeutet einen Mehraufwand an Materiel.
Die wohl beste, und für den Modellbau relevante, Methode es herauszufinden ist die sogenannte Sensorlose Technik (4.3.3). Wie bereits bekannt dreht sich ein Motor nicht nur, sondern Induktiert dabei auch Spannung, die sogenannte Gegenspannung. Diese erzeugte Gegenspannung kann der Steller meßen und dadurch die Position und Drehgeschwindigkeit des Rotors meßen. Da er nun weiß wie der Rotor steht kann er nun die Elektromagneten des Stators entsprechend bestromen. Leider sind jetzt immer noch nicht alle Probleme aus der Welt geschafft, wird nämlich keine Spannung Induktiert weiß des Steller nicht wie der Rotor steht und genau das ist ja die Situation, wenn der Motor steht. Dieses Problem wird gelöst, indem man den Stator solange blind schaltet, bis die Elektromagneten selbst genug Spannung Induktieren und somit eine Lageerkennung möglich ist. Durch dieses blinde schalten ruckelt ein Bürstenlosermotor anfangs sehr stark und fängt an zu pfeiffen.
Nun liegen die Vorteile eines Bürstenlosenmotors auf der Hand. Durch Wegfall der Bürsten hat der Motor eine längere Lebensdauer und nahezu keine Wartung. Der Wirkungsgrad solcher Motoren ist bedeutend höher als der von Bürstenmotoren. Desweiteren gibt es hier auch kein Bürstenfeuer mehr, was die Langlebigkeit des Motors weiter verbeßert.
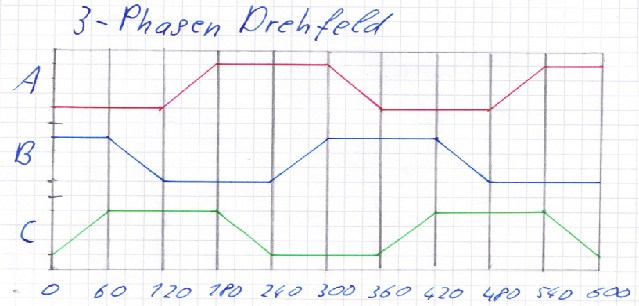
Ein Dreiphasen Drehfeld. Jede Linine beschreibt den Verlauf einer Phase. Unten die Gradanzahl.