4.4 Leistungsparameter
Genau wie ein Auto Beschleunigung und Höchstgeschwindigkeit hat, hat auch der Elektromotor Parameter, die man bewerten kann. Evtl. werde ich in den Folgenden Beschreibungen auf einige Begriffe zuruckgreifen, die dann geklärt sein sollten.
Die Bezeichnung U/V gibt an, wie viel Umdrehungen/Minute ein Motor pro Volt macht, und zwar ohne irgendeine Belastung an der Welle (dreht der Motor eine Luftschraube, sinken die Umdrehungen/Minute naturlich). Eine Typische U/V-Zahl ist zum beispiel 1000 Umdrehungen/Minute pro Volt. Hat man 1 Volt am Motor dreht er also mit 1000 Umdrehungen/Minute, bei 2 Volt mit 2000U/min , bei 3 Volt mit 3000U/min, zumindest sind das theoretische Werte.
Mit der elektrischen Leistung wird angegeben, wie viel elektrische Energie der Motor umwandeln kann. Dieser Parameter wird in Watt (Volt*Ampere) angegeben. Je nach Gewicht des anzutreibenden Modells braucht man einen stärkeren oder schwächeren Motor. Eine Faustregel besagt, daß man minimal 100Watt/kilo Flugzeug braucht (was aber wirklich die untere Grenze ist) bishin zu 300Watt/kilo, was schon ganz gut geht. uber 300Watt/Kilo Flugzeug wird es richtig heiß.
Der Leerlaufstrom gibt die inneren Verluste des Motors an. Der Perfekte Motor wurde keinen Strom brauchen, da er selbst genausoviel Strom Induktert wie er braucht um zu drehen. Durch mechanische Verluste oder Verluste in den Kuperferkabeln wird so etwas naturlich nie erreicht.
Der Wirkungsgrad hat sehr viel mit dem Leerlaufstrom zu tun, der Wirkungsgrad gibt an wie viel % der elektrischen Energie in mechanische Energie umgewandelt wird. Ein guter Motor hat um die 80% Wirkungsgrad. Sprich 80% der elekrischen Energie werden tatsächlich umgewandelt. Durch Eigenschaften des Motors hat der Motor nicht bei jeder Drehzahl und Last den gleichen Wirkungsgrad, es kann sein, daß er bei 15A 75% Wirkungsgrad hat, bei 30A aber 83%. Eine Wirkungsgradkurve könnte man zum Beispiel zeichnen, indem man die x-Achse mit Ampere bezeichnet und die y-Achse mit Wirkungsgrad in %. Jetzt wäre die kurve von jedem Motor nicht eine gerade sondern immer gebogen mit einem Höchstpunkt (zB bei 25A) und links und rechts abfallenden Kurven.
Der Drehmoment gibt an mit wie viel Kraft der Motor dreht. Dieser Wert richtet sich vor allem nach dem Gewicht des Rotors und der stärke der Lorentzkraft im Motor. Der Drehmoment gibt einem also zum Beispiel die Information, wie große Luftschrauben man an den Motor schrauben kann. Man kann den Drehmoment zum Beispiel mit Leistung dividiert durch U/V ausrechnen.
Verluste durch Wärme sind naturlich auch vorhanden und gelten minimiert zu werden. Hat der Motor eine starke Wärmeentwicklung kann es ihn ggf. sogar schädigen. Die Wärme muß auch abgefuhrt werden, was einen größeren Motor fordert. Durch die zu starke Wärmeentwicklung ist auch die Leistungsaufnahme begrenzt, denn je größer die Leistung destro größer die Wärmeentwicklung.
Das Gewicht und die Stabilität sind naturlich auch auschlaggebend. Fur kleinere Modelle braucht man naturlich auch einen leichteren Motor. Spaart man am Gewicht und spaar Eisen ein, spaart man auch an der Stabilität, weil ein Absturz des Modells ist nie auszuschließen. Ist der Motor mechanisch stabil geht er bei einem Absturz nicht so schnell kaputt, bedeutet hier muß man sich immer entscheiden.
Mehr dazu jetzt.
Naturlich macht der Motor allein nicht den Antrieb aus. Erst das komplizierte Zusammenspiel von Steller, Luftschraube, Akku und Motor machen einen Antrieb aus. Alle diese Bauteile, speziell die Luftschraube, mußen entsprechend dem Modell und den Anforderungen dimensioniert werden. Es macht kein Sinn eines dieser Glieder in der Kette zu groß bzw. zu klein dimensioniert zu kaufen. Das Antriebßet meines Modellflugzeuges zum Beispiel vereint einen 3 Zellen 2.3 Amperestunden Lipoly Akku, eine 11x7 Luftschraube, einen 500Watt Motor und einen 30Ampere Regler.
Nun werde ich alle Teile noch einmal einzeln ansprechen.
Der Lipoly Akku ist bei den Akkus das, was bei den Motoren der Burstenlosemotor ist. Er ist im Gegensatz zu den alten Nickelakkus wesentlich leichter und leistungsfähiger. Ein normaler Lipoakku fur den Modellbau hat 1-5 Zellen (jede davon hat ~3.7V), der Akku hat zwischen 0.8 und 4 Amperestunden (man kann aus einem 4 Amperestunden Akku genau eine Stunde 4 Ampere ziehen bis er leer ist) und wiegt zwischen 15 und 350 Gramm.

Bei den Luftschrauben gibt es sehr viele verschiedene Arten, deshalb will ich nur kurz darauf eingehen. Eine fur den jeweiligen Zweck richtig dimensionierte Luftschraube ist wichtiger als man vielleicht vermuten mag, eine Leistungszunahme von bis zu 20% bei Wahl der richtigen Luftschraube ist keine Seltenheit. Die YxY angabe (zB 11x7) ist eine Zollangabe, die die größe der Luftschraube bezeichnet. Je nach Wahl der Luftschrarube dreht der Motor schneller bzw. langsamer. Man kann seine Luftschraube mehr auf Geschwindigkeit oder auf Steigunsleistung auslegen, was man dann aber auch bei der Wahl des Motors/Akkus/Stellers berucksichtigen muß.


Der Steller (oder Regler) ist fur die Phasenschaltung und die Drehzahl des Motors zuständig. Da er sehr kompliziert aufgebaut ist möchte ich nur kurz auf den Steller eingehen. Der Steller besteht vor allen Dingen aus Microcontrollern, die fur die Phasenschaltung und die Generierung von Gleichstrom des Akkus in ein 3-Phasen Drehfeld zuständig sind. Der wohl wichtigste Parameter eines Reglers ist die Amperezahl, die angibt, wie viel Ampere Belastung der Regler dauerhaft ausgesetzt werden kann ohne kaputt zu gehen. Desweiteren können Regler auch einige Zusatzfunktionen haben, wie den Govener-Mode, der immer die gleiche Drehzahl hält, egal bei welcher Belastung, was vor allem bei Helikoptern sehr nutzlich ist. Andere Komfortfunktionen sind Sachen wie Sicherheitsabschaltung des Motors bei Unterspannung des Akkus, damit man immer noch lenken kann, aber kein Gas mehr geben.

Da die Grundlagen nun gelegt sind will ich gern noch ein bißchen tiefer in das Thema des bauens von Burstenlosenmotoren einsteigen. Das selbstbauen so eines Motors ist einfacher als man wohl vermutet. Naturlich braucht es seine Zeit um alles zu verstehen und das Handwerkliche Geschick sollte auch vorhanden sein, doch ist es kein Teufelswerk. Naturlich werden die ersten Motoren, die man selbst baut, keine Wirkungsgradtechnischen Wunderwerke sein und nicht an die Motoren von Profis oder namhaften Herstellern herankommen, trotzdem bieten selbstgebaute Burstenlosemotoren einige Vorteile. Neben dem Spaß und der Begeisterung die man wohl sowieso haben sollte, bietet der Selbstbau auch wirkliche Vorteile beim Fliegen.
Denn jeder kann seinen Motor nach seinen persönlichen Wunschen und seinem persönlichen Modell konstruieren. Man kann alles beeinflußen und demnach auch ensprechend optimieren. Wichtig zu sagen ist: Es gibt keinen perfekten Motor. Es gibt nur den fur die eigenen Bedurfniße richtigen Motor. Man kann den Motor immer nur auf wenige Parameter optimieren: Will man einen leichten Motor zum Beispiel fur einen Hallenflieger kann er nicht gleichzeitig mechanisch stabil sein, denn das schließt sich gegenseitig aus.
Dank diesen Vorteilen hat sich eine recht große Community um das Selbstbauen von Motoren im Modellbau zusammengefunden.
4.6.1 Nut/Polverhältnis
Das Nut/Polverhältnis ist eines der wichtigsten Eigenschaften des Motors. Die Nut ist der Elektromagnet und die Pole sind die Dauermagneten. Demzufolge muß die Zahl der Nuten immer durch 3 teilbar sein, da der Motor 3-Phasen hat (sonst wären die Phasen nicht gleichmäßig verteilt). Die Zahl der Pole muß zwingend durch 2 teilbar sein, da es immer gleich viele positive wie negative Pole geben muß.
Am besten funktionieren Motoren wenn das Verhältnis von Polen zu Nuten nicht zu weit auseinander geht, die Daumenregel besagt, daß es ein Verhältnis zwischen N/P = 1:1.5 und P/N 1:1.5 bestehen sollte. Wird dieses Spektrum verlaßen sinkt der Wirkungsgrad meistens ab. Was aber nicht bedeuten muß, daß es nicht auch extremere Kombinationen von Nuten und Polen gibt, die nicht gut funktionieren.
Diese Regeln gelten aber nur wenn jeder Zahn des Stators einzeln bewickelt wird, wird uber mehrere Zähne gewickelt sind andere Kombinationen ublich.
Konkrete Auswirkungen auf den Motor sind: Je mehr Polpaare desto weniger Drehzahl.
Aber auch nicht alle Verhältniße, die die Bedingungen erfullen, sind wirklich dazu geeignet benutzt zu werden, 9N8P zum beispiel ist ein schlechtes Verhältnis, da die Glocke sehr stark zu schwingen anfängt, was laut ist.
4.6.2 Hammer/Magnetverhältnis und Abdeckung
4.6.2 Hammerkopf/Magnetbreitenverhältnis und Abdeckung
Das Verhältnis zwischen Hammerkopfgröße und Magnetbreite sollte stets mit der Abdeckung des Rotors betrachtet werden. Die Abdeckung beschreibt wie viel % des Rotorinneren, also dem Teil, der zum Stator schaut, mit Magneten bedeckt sind. Also wie viel Platz zwischen den Magneten ist.
Das Verhältnis von Hammerkopfgröße und Magnetbreite sollte sich zwischen 1:0.8 und 1:1.2 bewegen. Oftmals hat sich gezeigt, daß das Verhältnis 1:1 eine gute Lösung ist, genauso wie eine 100% Abdeckung oftmal die höchste Leistung bringen. Denn verläßt man diesen Bereich fängt der Motor an teilweise gegen sich selbst zu arbeiten, ein verhältnis von 1:1.5 ist naturlich das Schlechteste, da so extrem stark gegeneinander gearbeitet wird. 66% des Ruckschlußes ist das Mindestmaß wie hoch die Abdeckung sein sollte.


Link ein recht wenig abgedeckter Rotor, rechts ein stark abgedeckter.
Quelle: powercroco.de
4.6.3 Wicklungen
Mit der Wahl der Windungszahl (also wie viele Windungen ein Elektromotor hat) wird vor allem eine Anpaßung an die Betriebßpannung vorgenommen. Will man den Fullgrad, also die Menge an Kupfer am Elektromagneten, gleich beibehalten, muß der Draht dadurch logischerweise dunner werden. Dabei wächst naturlich der Widerstand. Er wächst quadratisch zur Windungszahl, sprich doppelte Windungszahl gleich vierfacher Widerstand. Das fuhrt dazu, daß der Motor bei gleicher Spannung weniger leistet, da der Widerstand ja einen Verlust darstellt.
Herausgestellt hat sich, daß eine Eindrahtwicklung mit möglichst dickem Draht oft zum besten Ergebnis fuhrt. Andere Möglichkeiten als mit einem Draht zu bewickeln, ist mit mehreren parallel zu bewickeln, was aber rein handwerklich sehr schwer zu meistern ist.
Deshalb sollte man versuchen die gewunscht Wicklungszahl mit einem möglichst dickem Draht zu erreichen. Die dicke eines solchen Drahtes liegt um die 0.5 bis 1.2mm.
Doch bieter ein hoher Fullgrad nicht nur Vorteile, durch die hohe Dichte des Drahts läßt sich die Wärme sehr schlecht abfuhren, da eine Luftdurchströmung kaum möglich ist.
Zusammenzufaßend ist zu sagen: Mehr Windungen = weniger Drehzahl, mehr Windungen = höherer Innenwiederstand = allgemein weniger Leistung
dickerer Draht, bei möglichst gleicher Windungszahl (wegen Drehzahl und Spannung) = höherer Fullgrad, kleinerer Widerstand, mehr Leistung.
4.6.4 Verschaltung der Bewicklung
Bei der Verschaltung unterscheidet man zwischen Stern-und Dreieckßchaltung. Mit beiden kann man ans Ziel kommen, nur mit einem meistens beßer. Hier muß man wieder an die Auslegung des Motors denken.
Bei gleicher Leistungsauslegung muß man bei der Dreieckßchaltung um den Faktor 1.73 mehr Windungen benutzen. Ob man nun bei der Dreieckßchaltung mit dunnem Draht, oder bei der Sternschaltung mit dickem Draht näher an den optimalen Fullgrad herankommt ist eine Frage der Statormaßen.
Ein weiterer Nachteil bei der Dreieckßchaltugn ist, daß, falls der Motor nicht komplet symmetrisch im Aufbau ist, es Strome oben Stern unten Dreieck verschaltet
gibt, die ungewunschte Verlustleistungen hervorrufen und somit den Wirkungsgrad des Motors reduzieren und ihn dazu noch aufheizen.
Abschließend zu sagen ist also, daß die Sternschaltung im prinzip zu bevorzugen ist.
Desweiteren ist zu betonen, daß nicht alle Elektromagneten mit der gleichen Phase direkt nebeneinander liegen, sondern zum Beispiel AaBbCcAaBbCc. Wobei jede Variable fur eine Phase steht, die großen und kleinen Buchstaben unterscheiden, wie der Zahn nun genau bewickelt wird (ob von innen nach ausen oder von ausen nach innen), was hier aber nicht relevant sein sollte. Da dieses Thema extrem kompliziert ist und ich nicht fähig bin das alles verständlich und richtig zu erklären, empfehle ich allen, die es intereßiert, sich im Internet auf www.powercroco.de kundig zu machen.
Quelle: powercroco.de
4.6.5 Rasten
Jeder kennt es: Dreht man an einem Elektromotor an der Welle, spurt man immer wieder Berge die man überwinden muß, danach rutscht es selbst weiter. Dieses Phänomen nennt man rasten. Die Stärke des Rastens hängt vor allem am N/P Verhältnis und an der Auslegung von der Magnetbreite und der Hammerkopfbreite. Aber auch von der Luftspltenbreite und dem Ruckschluß.
Wenn ein Motor extreme Rastungen aufweist bedeutet das, daß er extreme Flußschwankungen des Magnetfelds hat. Durch diese starken Flußchwankungen können sich im Betrieb starke Wirbelströme bilden, die Wirkungsgradverluste hervorrufen. Daher sind im allgemeinen die weniger rastenden Motoren die beßeren. Ein Motor rastet noch extremer, wenn er nicht genau aufgebaut ist und Magnete heraußtehen oder die Luftspaltenbreite schwankt. Dadurch entstehen starke Magnetfeldschwankungen, die den Wirkungsgrad erheblich beeinflußen.
4.6.6 Halbacharray
Das Halbacharray ist eine spezielle Anordnung der Magneten im Rotor. Es werden dabei nicht nur Magneten mit plus oder minus in Richtung Stator positioniert, sondern auch welche quer, sprich mit plus und minus gleichzeitig. Sie liegen.
Das Halbacharray fuhrt das Magnetfeld des Stators weiter, schaut man sich die Pole an, sieht man, daß breitenmäßig immer zwei magnete nebeneinander liegen wurden, zumindest in der Bauweise wie auf diesem Bild. Das ändert die Eigenschaften des Motors teils erheblich. Das Halbacharray ist nicht immer eine gute Lösung, kann aber zu einem hohen Wirkungsgrad beitragen. Die Eigenschaften sind: Senkt die Drehzahl, senkt den Wirkungsgrad bei niedrigen Strömen (wenig Ampere), erhöht den Wirkunngsgrad unter Hochlast und die Drehzahlsteifigkeit (der Motor schwankt bei den Drehzahlen nicht so extrem bei verschiedenen Strömen). Man sollte sich also gut uberlegen ob sich ein Halbacharray wirklich lohnt. Das Einbauen gestaltet sich auch nicht als besonders einfach.
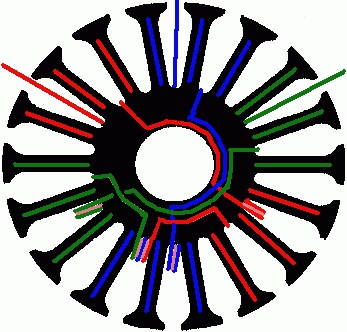
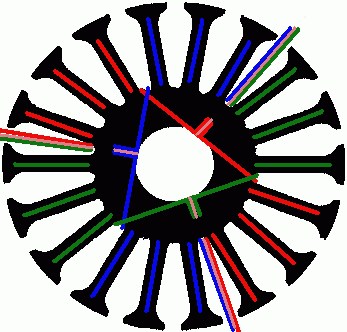
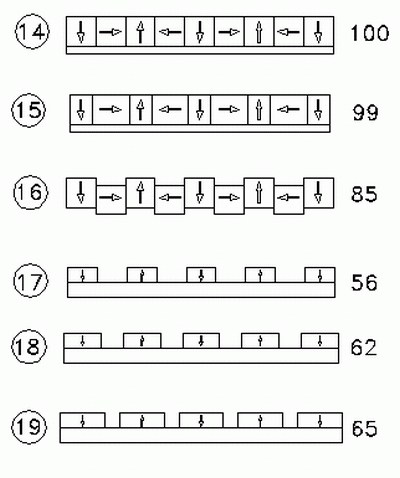
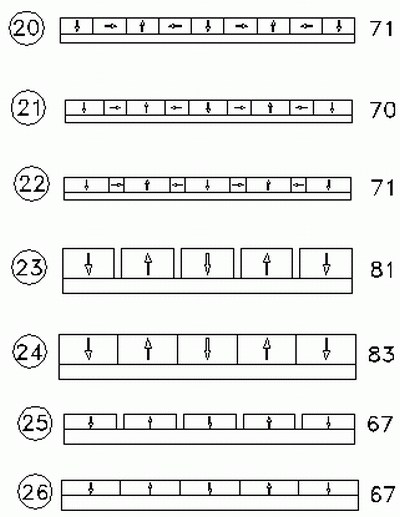
Auch der Ruckschluß hat hier einen erheblichen Einfluß auf die Eigenschaften des Rotors. Da es unzählig viele Möglichkeiten gibt, habe ich hier Bilder, die verschiedene Magneten/Ruckschlußkonstellationen zeigen.
Hierbei wurde der Rotor und die Pfeile bezeichnen die Polung. Der Ruckschluß ist der Spalt unten. Die Zahlen geben die % an, wie nah diese Konstellation an das Maximum (100%) herankommt.

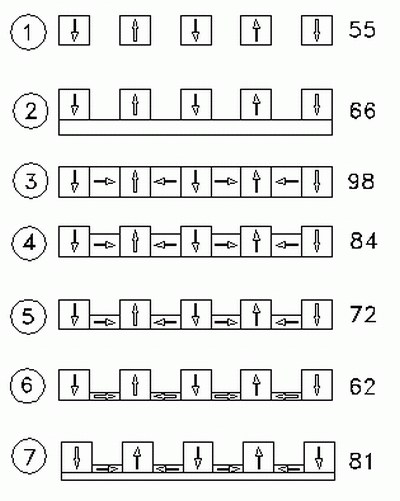
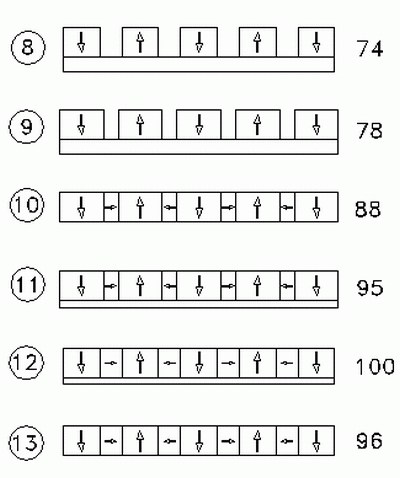
Quelle: powercroco.de
4.6.7 Der Stator
Nun stellt sich ja noch die Frage wie groß der ganze Motor sinnvollerweise gebaut werden soll.
Die Statorhöhe is die länge eines Statorzahnes, also wie Tief er von vorne gesehen ist, und wie lang somit der Motor wird. Diese Höhe sollte mindestens die Breite eines Statorblechzahnes, am Hammerstiel gemeßen, nicht unterschreiten. Solche Motoren sind naturlich folglich sehr kurz. Die maximale Größe wird vor allem durch die mechanischen Eigenschaften der Glpcke, wie die Lagerung, bestimmt, aber maximial sollte die Statorhöhe dem Statordurchmeßer entsprechen. Eine sehr gute Statorhöhe ist etwa die Hälfte des Statordurchmeßers.
Große Statoren sind aber auch wieder schlecht zu bekuhlen, was man immer bedenken sollte.
Möchte man die gleiche Drehzahl erreichen gilt: höherer Stator = weniger Windungen. Höherer Stator = mehr Leisung. Höherer Stator = weniger Windungen, deshalb dickerer Draht -> höherer Wirkungsgrad.
Umso größer der Statordurchmeßer umso größer das Drehmoment (größere Luftschraube mäöglich) und umso niedriger die Drehzahl. Beim Statordurchmeßer sollte man auch auf die Nutanzahl achten, denn hat man einen kleinen Durchmeßer und eine hohe Nutzahl, hat man sehr wenig Platz um eine Nut herum, was die Windungszahl und Drahtdicke sehr begrenzt und somit den Wirkungsgrad heruntersetzt. Macht man es genau andersrum, also großer Durchmeßer geringe Nutzahl, muß man sehr viel Draht benutzen.
Auserdem muß, zumindest beim Außenläufer, noch genug Platz sein um in der Mitte die Welle und Kugellager unterzubringen.
4.6.8 Luftspalt/Ruckschluss/Magnetdicke
Den letzten wichtigen Punkt den ich ansprechen will ist das Luftspalt/Ruckschlußverhältnis.
Zwischen dem Hammer des Stators und den Dauermagneten des Rotors muß Platz sein. Nur wie groß sollte dieser sein? Der Luftspalt sollte 0.2-0.5mm groß sein. Die Magnete sollten auch nicht zu dick sein, denn mehr als 2.5mm macht keinen Sinn, es sei denn der Motor ist wirklich hoch belastet. Der Ruckschluß des Rotors sollte nicht zu dick und nicht zu dunn sein, ist der zu dick bundelt er viel magnetische Strömng auf sich, ist er zu klein lenkt der das Magnetfeld nicht richtig. Eine Verdickung des Ruckschlußes fuhrt zu einer Drehmomenterhöhung und einer Drehzahlerniedrigung. Eine Faustregel besagt, eine gute Ruckschlußdicke ist so dick wie die halbe Hammerstielbreite. Ein guter Test um die paßende Dicke herauszufinden ist auch eine Buroklammer von außen an der Stator zu halten, hält die Buroklammer nichtmehr ist ein noch dickerer Ruckschluß nicht sinnvoll.
Allgemein gilt wieder: kleiner Luftspalt = viel Drehmoment = hohe thermische Belastung, großer Luftspalt = hohe Drehzahl, dunne Magnete = wenig Kraft aber leich, dicke Magnete = mehr Kraft aber mehr Gewicht, stärkere Magnete = stärkeres Rasten.
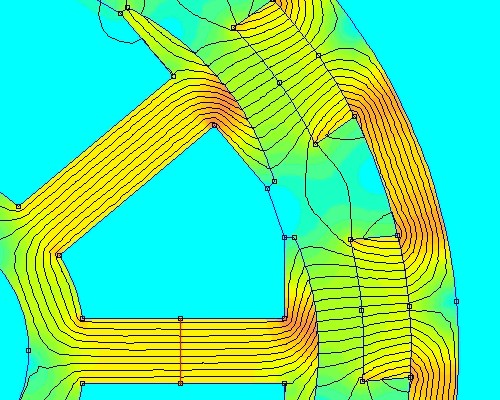
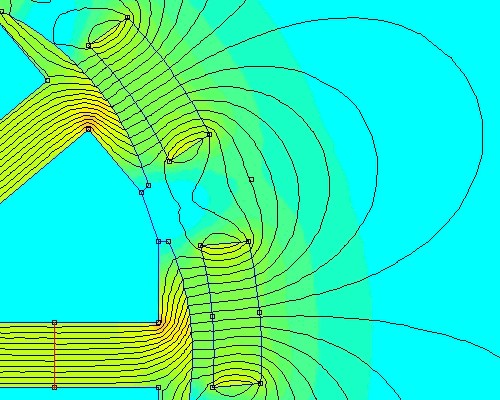
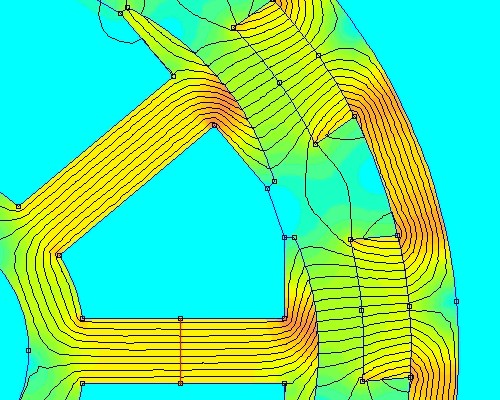
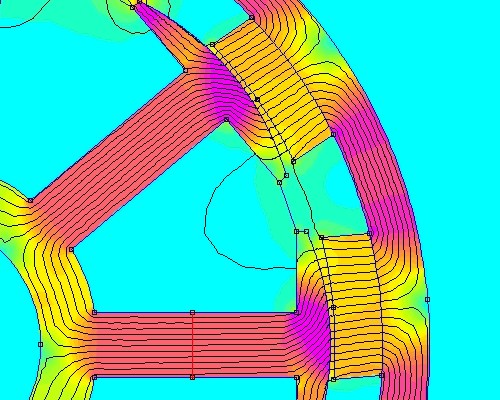
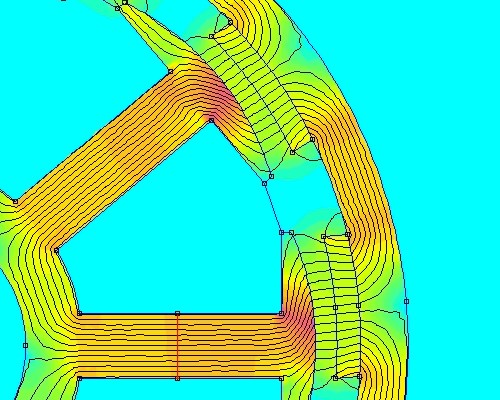
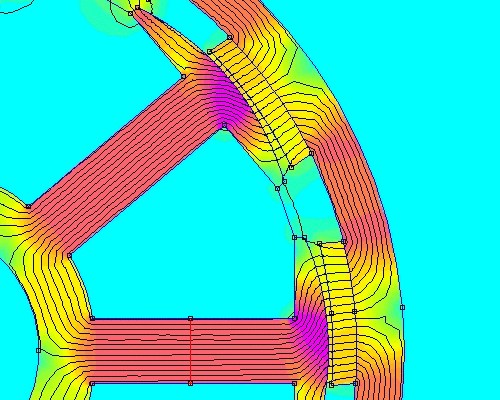
Auch hierzu hab ich ein paar gute Bilder, die das eindrucksvoll zeigen. Rot/lila bedeutet starker Magnetfluß, grun/turkis eine kleiner. Die Linien sind die sogenannten Feldlinien, sie zeigen den Fluß des Magnetfeldes an.
Nun könnte man denken umso roter umso besser, was nur begrenz stimmt. Denn umso roter, umso höher auch die Belastung des Materials. Am besten ist also ganz klar die Lösung unten links.
Quelle: powercroco.de